Mobile Robot Control Experiment [A047619] Spring 2022
Introduction
During my research assistant experience, I have completed several academic projects and one undergraduate selective course. This course named Mobile Robot Control Experiment [A047619], which is opened for third year in university and mainly in the mobile robot. In this course, I have prepared the knowledge about control algorithms in mobile robot and robotic arm. Then, I also have been coding some demo with hybrid robot which is consisted with mobile platform and robotic arm.
I am so glad that my students have had excellent work in their PBL (Problem Based Learning) process and final design. I am very pleasured to share their work in my website, their work is partly private and mostly open sourced.
Exhibition
1. 复杂环境下无人车环境感知和自主定位系统 (Private)
Introduction
本项目在LOAM框架基础上,使用深度学习网络实现语义分割,提取环境中的语义信息,将语义信息和雷达点云信息进行融合,实时构建出具有物体标签的语义地图。并在此基础上,使用构建好的语义地图能较精准地检测车辆、行人等动态物体,在自主导航过程中,具有更好的安全性。
本项目最大的优点是使用了语义信息,通过语义信息与几何信息的融合,丰富了地图的可用性,提高了机器人与环境的交互能力。
展望:本项目只粗略实现了感知定位这一模块,后续计划在路径规划上进行设计,争取能实现无人车、乃至无人机的自主导航。此外,本次使用的语义信息只是简单粗暴的将提取的语义信息与地图上的点云信息进行融合,并不能算是语义SLAM。因为语义信息并没用在特征点提取或者后端优化中。后续希望在这方面进行改善,希望将语义信息加入到特征点提取和后端优化中,进行建图。
Impression
Design Process:
PBL教学方式让我们具备克服困难的勇气,培养我们独立思考、团队合作的能力。
Course Process:
通过本次PBL课程的教学,我们小组收获颇多。可以说,这是上大学第一次接触PBL课程,也非常感谢王斐老师能给我们提供这么好的机会,让我们学到了很多在其他课上都学不到的东西。我们之前做课设,花费大量时间仅局限于专业知识上。而这次PBL课程不仅让我们学到了更多的专业知识,我认为更重要的是,培养了我们独立思考、解决问题、面对困难不畏惧的能力,锻炼了我们思维的能力。这也是王老师提出PBL的初衷吧,在本门课程中,能实现多少东西并不重要,重要的是能对存在的问题提出解决办法才是最重要的,不管最后由于自己的能力有限,是否能够实现。毕竟,社会需要的是敢于创新,能够提出自己想法的人。
小组作业,一直是大学里不可言喻的一个词。由于每个人的能力不一样,难免会导致在实现小组目标的路上产生不一致的分歧。通过这次PBL课程,小组在发现问题时,不断调整,不断解决,组员们也在解决困难上付出了许多努力,也提升了我们的团队协作能力。对于当leader经验不丰富的我来说,这次课程也提高了我的领导能力。当组员遇到问题时,我也尽最大努力去给组员们讲解,和组员一起讨论问题,最后也达到了较好的效果。
我认为,这种PBL教学方式能让学生收获很多,培养了我们独立思考、解决问题的能力。这也让我们面对以后的各种开题、答辩更加从容。
Advice:
感谢王斐老师给我们提供PBL课程的机会,让我们收获了许多。也感谢助教们给我们带来的课程讲授,让我们接触并学到了许多专业知识。最后祝王斐老师工作顺利,身体健康!祝助教们科研顺利,身体健康,在未来的奋斗道路上更加成功!也祝参加该课程的所有同学升学顺利、科研顺利、工作顺利,祝大家前程似锦,未来可期,顶峰相见!
Students:
| Leader | Member |
|---|---|
| 刘尊涛 | 侯烨 栾圣哲 孟凡奇 任明民 周志炜 崔乃元 |
2. 仿真解决AGV小车在复杂道路载物位移问题 (Private)

Introduction
仿真解决 AGV 小车在复杂道路载物位移问题,简而言之,就是通过仿真解决 AGV 小车在复杂道路因颠簸导致物品掉落的问题。基于无人搬运车的运送方式,AGV小车就会面临沿固定轨道行驶灵活性弱,不能适应复杂环境,运送过程出现颠簸,物品可能会不慎掉落的问题。而利用仿真初步建立带有机械手的AGV仿真小车,可以实现自主导航以及检测定位并通过检测到的物品位置与原位置进行运算将物品归位的功能。
Impression
Design Process:
实践解决实际过程中的小问题,丰富知识,解决问题。
Course Process:
助教们的授课都很细致认真,小组项目也合作愉快,完美完结。
Advice:
无建议,线上没有线下还是有点遗憾!
Students:
| Leader | Member |
|---|---|
| 张雪娇 | 曹航彬 朱皓宇 刘俊 马小涵 周昊 |
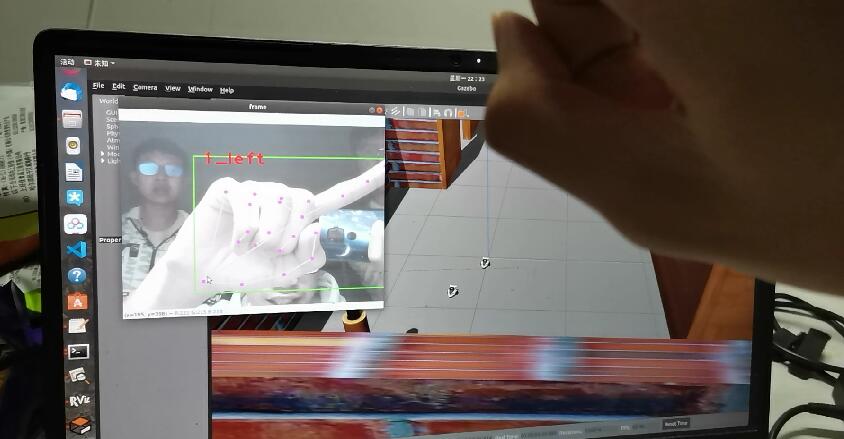
3. 三维手势姿态估计 (Private)
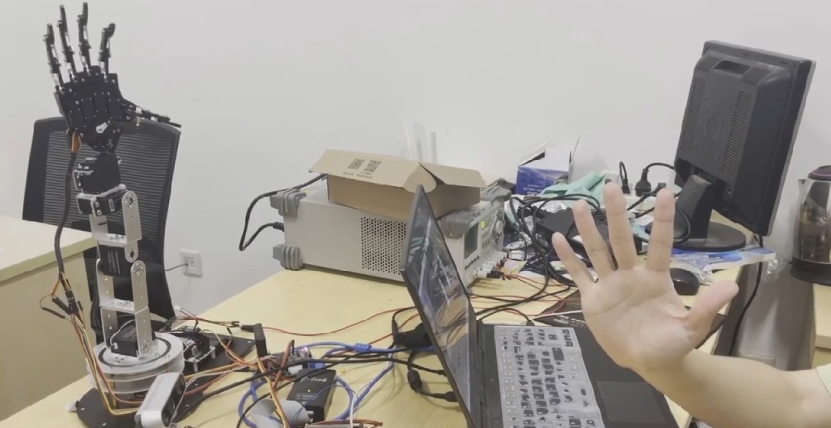
Introduction
针对于当前手在人类的日常生活中发挥着重要的作用,以及当前人机交互的融合,能够在很大程度上弥补传统的不足。基于此想法,我们通过深度相机,采集到三维图像,通过点云相关的算法对其进行,并结合机器人运动学的知识。通过对手势变换这个过程,让机械手能够模仿人的动作。
Impression
Design Process:
很难但是很开心。
Course Process:
改变了传统课程的条条框框,给了足够的自由去将想法变为现实,培养了独立思考、解决问题和团队协作的能力。我想这么课程开在大三下,对于我们对之前知识的掌握有足够的应用空间,为研究生发展打下了坚实的基础。
Advice:
可以增加PBL设计记录本,来反应团队在做的过程中遇到的问题以及如何解决的。
Students:
| Leader | Member |
|---|---|
| 胡绍丽 | 常家铭 傅彬 陈仟 赵劲宇 宋迪 |
4. 基于slam与机器人视觉的无人送货开发 (Private)

Introduction
由于疫情因素,近年来无接触式送货逐渐衍生出来,智慧物流也因此蓬勃发展。智慧物流是指基于物联网等智能化技术,提升运输、仓储、配送、包装和装卸等基本业务效用的过程。是新一代科技应用于物流行业、实现颠覆性创新发展的产业链升级过程。
我们以工业智慧物流为主题,基于无人驾驶技术,使用多种传感器,结合计算机视觉、SLAM、路径规划等新兴人工智能技术,完成了智慧物流系统中搬运机器人的技术方案设计,成功实现了多项关键技术。并试图以搬运机器人技术实现为基础,完成智慧物流场景下各种人工智能技术应用操作的泛化。
我们主要实现的任务有阿克曼模型底层控制,Gmapping建图,L1制导路径规划,红绿灯识别,aruco二维码识别测距,车道线识别,socket通信和可视化界面。
Impression
Design Process:
和享受小组合作中攻克一道道难题后的成就感。
Course Process:
这是上大学以来第一次接触了PBL课程设计,通过这种课设我们学习到了很多知识,从项目调研,到确定项目,之后的布置任务以及用什么方法实现任务,都让我们受益良多,十分喜欢这种形式。
Advice:
由于疫情原因没有玩到奥博机械臂有些遗憾,另外老师,助教们辛苦了。
Students:
| Leader | Member |
|---|---|
| 金禹锟 | 高逸 林初航 李佳悦 刘迪 赵宜晨 张远宁 |
5. 小规模群体机器人与人机交互和SLAM导航系统(Open Source)
Introduction
基于ROS系统,让多个机器人保持一定的队形运动。可以通过模式识别或者电脑键盘操控的方式控制领航者机器人的运动,让跟随者机器人遵循领航者运动。
在此基础上,使用多个机器人完成同时建图、导航的任务,节省时间,简化需要大量人工完成的任务。
Github/Gitee Repo URL:
https://github.com/r135792uuuu/Mulitiple-robot-navigation-with-HRC
Impression
Design Process:
项目中有很多功能包,这些功能包之间存在各种差异和冲突。不断解决它们彼此耦合的问题非常考验耐心,也有很大的收获。
Course Process:
虽然课程难度比较大,但是能够做我们自己想做的内容,有内驱力,愿意去做。不是固定刻板的任务,做起来挺有动力。而且小组之间合作完成任务,也让我觉得以后一个项目组里合作更有经验。
Advice:
没能做到实物挺遗憾的,光写rviz就挺头疼,还要解决各种兼容冲突。助教师兄们都很好,虽然课难度有点大,但还是很不错的。
Students:
| Leader | Member |
|---|---|
| 金禹锟 | 高逸 林初航 李佳悦 刘迪 赵宜晨 张远宁 |
6. 基于TURTLEBOT3目标跟踪改进办法(Open Source)
Introduction
此次课程设计是针对追踪人体方法的尝试改进,因为人体追踪本身的难度就不是很大,只是想通过更好更精准的办法实现这次实验,但较为令人沮丧的是,目前大多数办法还需要狠下功夫,为了完成实验,又走回了原来的老路,选择使用yolo-fastest进行。
Github/Gitee Repo URL:
https://github.com/Ajun11/CLASS-DESIGN-group-six--TURTLEBOT3
Impression
Design Process:
鉴于小组成员主力有较大的升学压力,且此次实验已耗费不少同学之精力,开展实验一周多,目的已足够。
Course Process:
课程设计做出来其实还是靠主力成员吧,主要是小组内成员太多,很多同学基础不好很多简单的任务无法实现,这部分需要主力来做,最后的展示也还是主力去做,哎,这实在是没办法。课程里有不少学长学姐在这期间讲述实验,第一个:实验效果完美,项目立点很高,视觉观感极佳。但是这,我其实还想问问,这种项目我们估计也学不到东西,说句实话,一次实验课讲述的项目工程代码如果能带着同学们从头撸到尾,估计帮助不小,这样如排山倒海堆过来的代码,一下子好几千行,动不动深度学习,这个不叫做“实验”,更像展示项目。
Advice:
助教们做的挺好的,已经很棒了,但实验主体是学生,希望多加考虑。
Students:
| Leader | Member |
|---|---|
| 方俊杰 | 刘君 董晨皓 黄伟强 武世元 唐昌平 蒋祥杰 |
7. 移动机器人终端智能识别抓取(Open Source)

Introduction
采用带有移动平台的机械臂与多种功能、大小不同的机器人,共同完成快递的配送任务,实现疫情环境下快递配送过程无人参与的功能。体积较大的机器人负责快递站分拣与大量快递运输,体积较小的机器人负责在室内、写字楼内进行快递配送。整体配送过程仅有机器人参与,且加入了语音交互的人机交互方法,使用户使用更加快捷方便。
Github/Gitee Repo URL:
https://github.com/wanghppp/NEU_WHP_PBL.git
Impression
Design Process:
很累,但比较充实。在PBL设计过程中,我们经历了类似于科研、竞赛等过程中团队合作的过程,团队中几个队友相互配合完成一个项目,这是其他课程中没有过的经历。在完成任务的过程中,我们也需要不断查找资料,在调试代码的过程中,我们也需要不断寻找代码或环境中的错误。是对团队协作、代码能力和工程能力的多方面提高。
Course Process:
在做PBL的过程中,我们可以将以前理论课上学到的东西更加灵活地运用,而不再需要完成老师布置的作业。因为让我们自己选择自己喜欢的研究方向,自然学习效率就会高一些,而且在面对一些问题时的灵活处理,也会让我们更好地理解理论课所学内容。当然,在PBL制作过程中,我们也遇到了许多问题,这也可以让我们明确我们的不足之处,更加明确自己学习的方向。最后,当项目完成时,看到机器人按照自己的意愿运动时,真的有一种喜悦感与自豪感,让我们可以深刻体会到学习的快乐。
Advice:
课上可以将一些算法详细地讲解一下,然后课后留对应的难度适中的作业,要求我们复现相应内容,这样我们可以更好地理解课上的内容。
Students:
| Leader | Member |
|---|---|
| 王海澎 | 刘浩铭 李东晓 张棋泓 宗守之 |
8. 水下自主抓取机器人和水面跟踪无人船协同作业(Open Source)
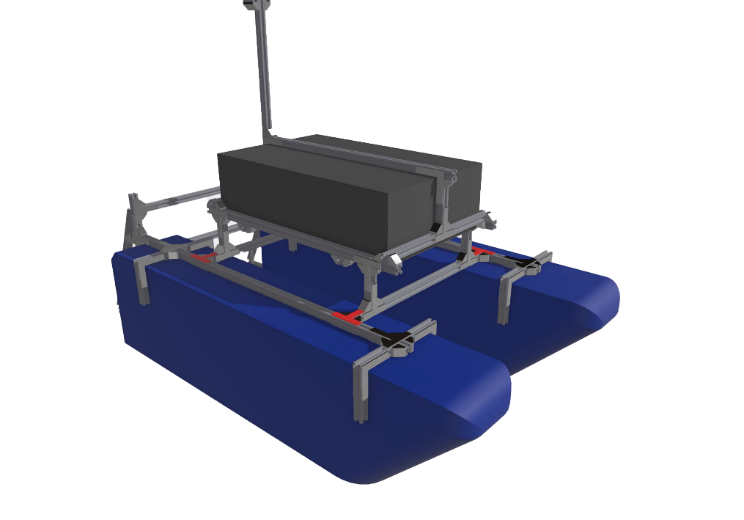
Introduction
水下机器人最大的问题是通信问题,水声通信成本比较高,线缆通信又不能满足探测距离的限制。本团队从机械电路底层设计开始,自主设计了一个水下机器人与无人船的协同,能够低成本地解决水下机器人通信的问题,同时又为水下机器人抓取物体或其他作业提供一个中继的平台,使水下机器人能够突破范围的限制更好地完成自主作业。
Github/Gitee Repo URL:
暂时还没有上传到git上面,后续比赛结束后会陆续上传(https://gitee.com/cc_1_2)。
Impression
Design Process:
水下方面网上很少详尽的案例,一切都是从0到1,困难重重,但是取得阶段性成果时还是很有自豪感的。
Course Process:
1、通过学习本门课程,真切的接触到了很多原本浅尝而止的知识。
2、通过PBL帮我们的项目理清了思路,同时也锻炼了我们的表达展示的能力。
Advice:
可以的话,可以添加更多的实物实验环节。
Students:
| Leader | Member |
|---|---|
| 陈晨 | 何乐生 王兴元 李煜 刘志豪 高景星 贺晓林 |
9. 基于深度学习的多任务小车(Private)
Introduction
本课题基于我校智能车实验室正在研究的全国智能车百度组比赛,利用百度官方下发的车模,通过下位机的底盘控制与上位机的数据处理两者相互通讯以完成复杂赛道的行驶和任务。其中最重要的是利用深度学习网络对不同环境下的车道线进行实时检测以及准确识别路径中标志物完成对应的任务。
Impression
Design Process:
团队成员之间的合作才可以推进项目的开展。
Course Process:
巩固了以前学过的有关机械臂运动和控制的知识,复习了ROS课上学过的知识,强化了代码能力。
Advice:
建议每个助教学长在讲完之后留一些任务或者作业,更有助于加深理解。
Students:
| Leader | Member |
|---|---|
| 王佳强 | 黄歆伟 尤卓越 王飞亚 张文 贾森平 唐宇琪 |
10. 协助式运输机器人创新设计(Open Source)

Introduction
本项目旨在改进运输机器人的人机交互与智能化功能,打造“协助式”智能运输机器人。协助式运输机器人能够根据用户的手势、语音等指令,跟随用户移动完成运输,并实现自动导航避障、多机器人协同运输、物品识别与抓取装卸、定制不同物品的场景化运输路线、防疫物资的消杀传递等功能。
Github/Gitee Repo URL:
https://gitee.com/molight/object_grasp_with_sr
Impression
Design Process:
一个技术问题往往可以扩展出很多知识点,自主解决问题地过程就是很好的学习过程。
Course Process:
自由度很高,可以让大家自主学习相关技术,将想法变为现实。
Advice:
助教们可以在过程中跟踪大家的项目进度,有针对性地给予技术指导。
Students:
| Leader | Member |
|---|---|
| 孙翔宇 | 彭宇章 张志远 王俊杰 刘子怡 杨淳元 符展鹏 |